

فرض کنید میخواهید به یک شهر جدید که تا به حال به آنجا مسافرت نکردهاید بروید و هیچ اطلاعاتی درباره آن ندارید. چطور میتوانید مسیر هتل یا موزه را پیدا کنید، در حالی که نمیدانید هر مکانی کجا قرار گرفته؟ به یک نقشه یا فردی نیاز دارید که بگوید «هتل شما کجاست؟» دقیقاً همین موضوع درباره رباتها هم صدق میکند. یک ربات برای فعالیت در محیط، به مجموعهای از اطلاعات نیاز دارد و هرچقدر این اطلاعات دقیقتر باشد، احتمال اینکه ربات به هدفش برسد بیشتر خواهد بود.
در این مقاله با مفهوم ربات آموزشی، نحوه کار حسگرها و دو نمونه پرکاربرد یعنی تیمیو و ربات همستر اسکرچ آشنا میشوید. همچنین نمونههای واقعی برنامهنویسی این رباتها توسط فراگیران یاسان را میبینید تا تفاوت میان یک دستور ساده و رفتار واقعی ربات روشن شود.
توضیح یکی از مربیان یاسان درباره نحوه کار ربات تیمیو
پیش از هر چیز بهتر است ببینید ربات تیمیو در عمل چطور کار میکند. در این ویدیو یکی از مربیان آکادمی یاسان، طرز کار حسگرها و منطق برنامهنویسی تیمیو را قدمبهقدم نشان میدهد.
ربات آموزشی چیست؟
ربات آموزشی یک دستگاه ماشینی یا سیستم الکترونیکی است که با استفاده از مجموعهای از دستورات کدشده میتواند وظیفه مشخصی مانند حرکت روی مسیر از پیش تعیینشده را انجام دهد. برخلاف رباتهای صنعتی که در محیط ثابت کارخانه کار میکنند، رباتهای آموزشی برای یادگیری کودکان و نوجوانان طراحی شدهاند و سادهتر، ایمنتر و مقرونبهصرفهتر هستند.
چالش اصلی ساخت رباتهای قابل کنترل
هیچ رباتی نمیتواند بهطور قطعی حالت واقعی محیط اطراف خود را درک کند. رباتها فقط میتوانند دنیای واقعی را بر اساس اندازهگیریهای حسگرهای خود حدس بزنند و تنها با تولید سیگنالهای کنترلی روی آن تأثیر بگذارند.
یکی از اولین مراحل طراحی رفتار یک ربات، ساخت مدلی ساده از محیط واقعی است. این مدل باید اطلاعات دریافتی از حسگرها را تفسیر کند و بر اساس آن، واکنش مناسبی مانند توقف، تغییر مسیر یا کاهش سرعت را انتخاب کند. اگر شرایط محیط با فرضهایی که در برنامه تعریف شده هماهنگ باشد، ربات میتواند تصمیم درستی بگیرد؛ اما در دنیای واقعی عواملی مانند نور، صدا، سطح زمین و موقعیت موانع دائماً تغییر میکنند. به همین دلیل، آموزش برنامهنویسی کودکان با استفاده از رباتها فقط به نوشتن چند دستور محدود نمیشود؛ کودک باید برنامه را آزمایش کند، خطاها را تشخیص دهد و منطق تصمیمگیری ربات را مرحلهبهمرحله بهبود دهد.
انواع حرکت رباتها
رباتها میتوانند دو نوع حرکت را اجرا کنند. نوع اول توالی از پیش تعیینشدهای از حرکات ذخیرهشده است. نوع دوم حرکاتی است که در لحظه، بر اساس ورودی حسگرها محاسبه میشود.
حسگرهای ربات آموزشی
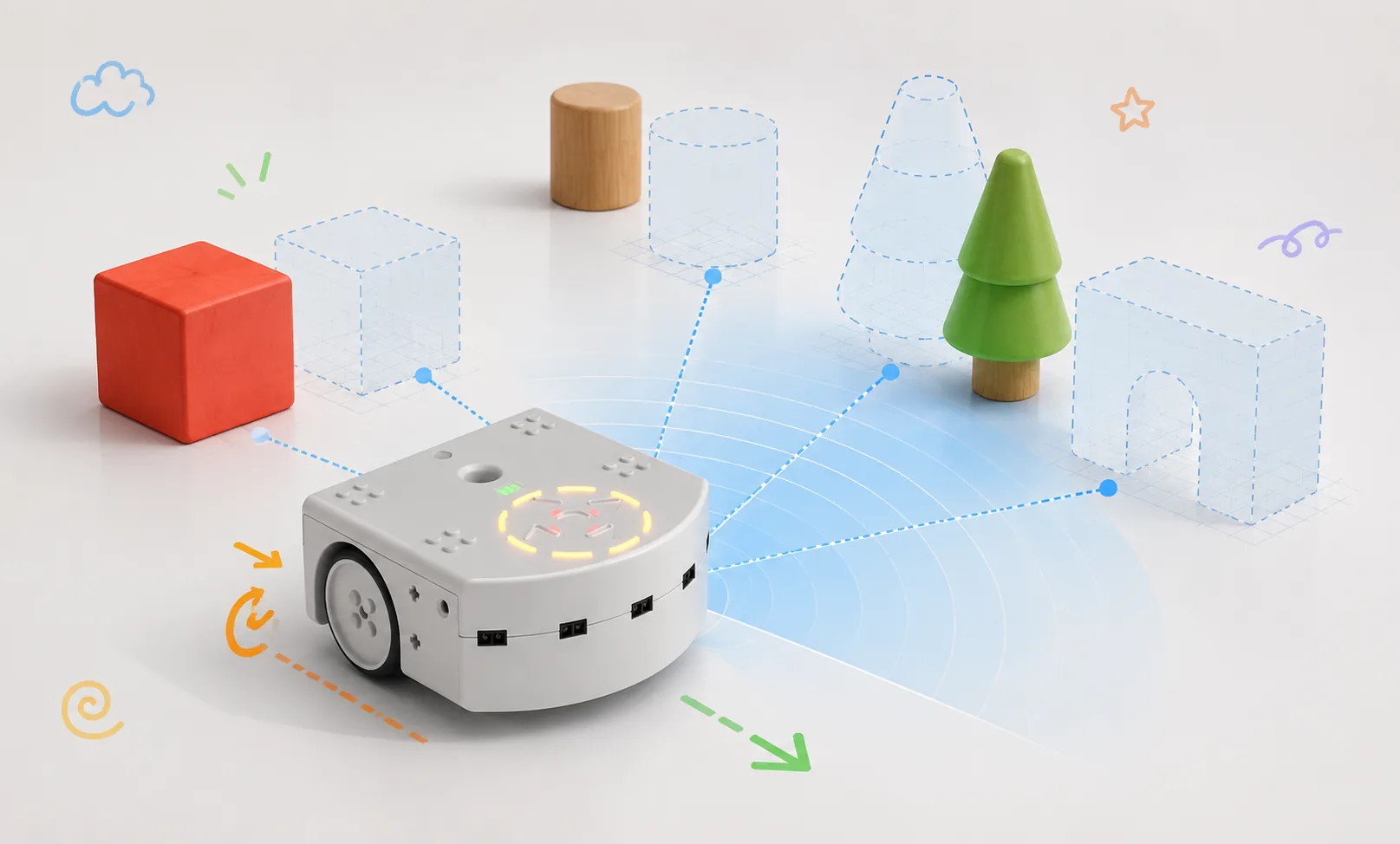
حسگرها مانند واسط میان ربات و محیط واقعی عمل میکنند. چهار حسگر متداول در رباتهای آموزشی به شرح زیر است.
دو نوع از رباتهای آموزشی متداول، رباتهای همستر و تیمیو هستند.
تیمیو چیست؟ آشنایی با ربات آموزشی تیمیو (Thymio)
تیمیو نتیجه همکاری میان دو دانشگاه سوئیسی، EPFL (دانشکده فنی فدرال لوزان) و ECAL (دانشکده هنر لوزان) است. این ربات کاملاً متنباز است؛ سختافزار آن تحت مجوز Creative Commons Attribution-ShareAlike 3.0 و نرمافزار آن تحت مجوز LGPL منتشر شده، یعنی هرکسی میتواند کد و طراحی آن را ببیند و تغییر دهد. تولید و توزیع تیمیو را انجمن غیرانتفاعی Mobsya بر عهده دارد.
خبر تازه درباره نسل بعدی تیمیو: نسخه فعلی این ربات که سالهاست در مدارس و آکادمیهای سراسر دنیا استفاده میشود، Thymio II نام دارد. طبق اعلام فروشندگان رسمی، تولید Thymio II در حال متوقف شدن است و Mobsya نسل جدید این ربات، Thymio 3، را معرفی کرده که قرار است از سپتامبر ۲۰۲۶ در دسترس مدارس و آکادمیها قرار بگیرد. تفاوت اصلی نسل جدید، پردازنده دوگانه (ESP32 و STM32) است که پشتیبانی بلوتوث و اجرای برنامههای پایتون را قویتر میکند، در حالی که ابعاد و طراحی کلی ربات (حدود ۱۱۰ در ۱۱۰ میلیمتر) تغییر چندانی نکرده است.
برای برنامهنویسی ربات تیمیو مسیرهای مختلفی وجود دارد. فراگیران مبتدی معمولاً کار را با زبان بصری VPL3 یا اسکرچ شروع میکنند؛ محیطهایی که در آنها بهجای نوشتن کدهای متنی، بلوکهای رویداد و عمل را در کنار یکدیگر قرار میدهند. به همین دلیل، آموزش اسکرچ برای کودکان میتواند نقطه شروع مناسبی برای آشنایی با منطق برنامهنویسی ربات، شرطها و واکنش به حسگرها باشد. فراگیران پیشرفتهتر نیز میتوانند تیمیو را با پایتون یا Blockly برنامهنویسی کنند. نرمافزار رسمی Thymio Suite این ابزارها را در یک محیط یکپارچه ارائه میدهد و برای ویندوز، مک، لینوکس، اندروید و آیپد در دسترس است.
با استفاده از VPL3 یا اسکرچ میتوان به تیمیو دستوراتی مثل اینها داد:
- از برخورد با موانع جلوگیری کن.
- یک خط را دنبال کن، یا از افتادن از روی میز جلوگیری کن.
- بارکد را بخوان.
- صداها را ضبط و پخش کن.
- موقعیت خودت را با شتابسنج سهمحوره تشخیص بده.
- دمای هوای اطراف را اندازه بگیر.
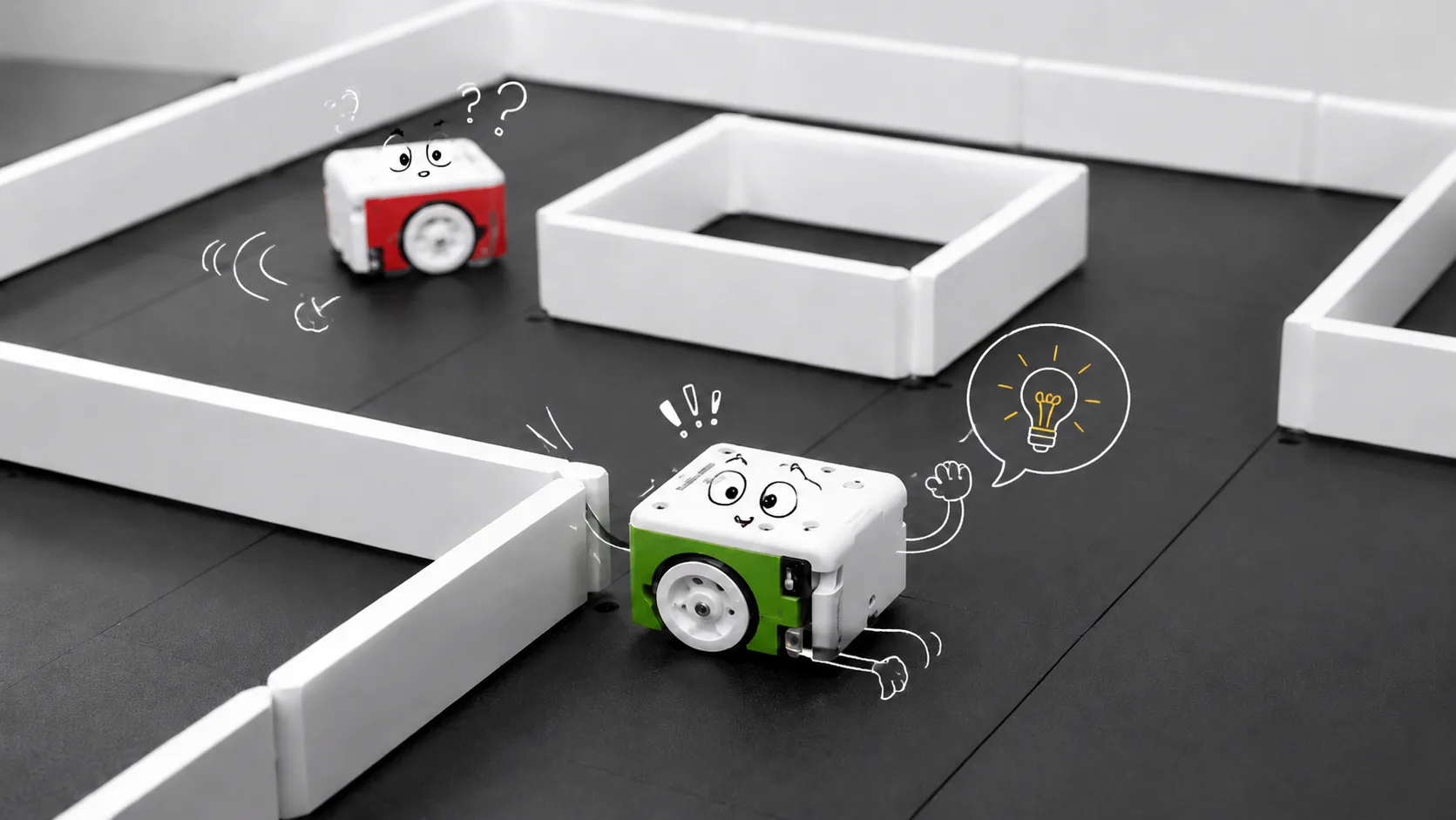
در تصاویر زیر، حسگرها و دو کاربرد عملی ربات تیمیو را میبینید.



ربات همستر اسکرچ چیست و چگونه برنامهنویسی میشود؟
عبارت ربات همستر اسکرچ به پروژههایی اشاره دارد که در آن کودک رفتار ربات همستر را با بلوکهای تصویری اسکرچ برنامهریزی میکند. ربات همستر هم مانند تیمیو با هدف آموزش برنامهنویسی ساخته شده و از اسکرچ، پایتون، جاوااسکریپت و زبانهایی مانند سی، سیپلاسپلاس، جاوا و اندروید پشتیبانی میکند.
این ربات حسگرهای متنوعی مثل نور، دما و شتابسنج دارد. حسگرهای زیر بدنه آن برای دنبال کردن خطوط استفاده میشوند و امکان افزودن حسگرها و محرکهای خارجی به پورتهای اضافی آن هم وجود دارد؛ به همین دلیل میتوان پروژههای متنوعی با آن ساخت.

نمونه واقعی ربات همستر اسکرچ: پروژه امیرارسلان
یکی از بهترین راهها برای فهمیدن کاربرد ربات همستر اسکرچ، دیدن کار یک فراگیر واقعی یاسان است. امیرارسلان تقیراونجی، از دانشآموزان آکادمی یاسان، با ترکیب ربات همستر و برنامهنویسی اسکرچ پروژهای طراحی کرده که در آن به ربات دستور میدهد ماموریتهای مشخصی را دنبال کند. نکته جالب پروژه او این نیست که فقط ربات را حرکت داده، بلکه منطق پشت هر ماموریت را خودش تعریف کرده و همان روند حل مسئلهای است که در آکادمی یاسان از برنامهنویسی به عنوان ابزار آن استفاده میشود، نه هدف نهایی.
در ویدیوی زیر امیرارسلان همین پروژه را ارائه میدهد و مرحلهبهمرحله توضیح میدهد که چطور دستورات اسکرچ را به رفتار واقعی ربات همستر تبدیل کرده است. این نوع ارائهدادن جلوی دوربین هم بخشی از همان مهارتهای نرمی است که یاسان کنار برنامهنویسی روی آن کار میکند؛ توانایی توضیحدادن یک ایده فنی با زبان ساده و اعتماد به نفس.
پروژه کامل امیرارسلان، همراه با توضیح بیشتر، در صفحه پروژه های فراگیران یاسانی هم قابل مشاهده است.
تجربه واقعی: بچههای مدرسه ستوده با ربات تیمیو
تئوری تا وقتی خودش را در یک کلاس واقعی نشان ندهد، ناقص است. در این ویدیو گروهی از دانشآموزان مدرسه ستوده را میبینید که با ربات تیمیو کدنویسی میکنند و یک چالش واقعی و حرفهای را حل میکنند؛ همان چیزی که ما در یاسان آن را «تفکر الگوریتمی در عمل» مینامیم.
این تجربه نشان میدهد آموزش برنامهنویسی ربات زمانی مؤثرتر است که فراگیر فقط فرمانها را حفظ نکند، بلکه نتیجه هر دستور را روی حرکت واقعی تیمیو ببیند، خطا را پیدا کند و برنامه را دوباره اصلاح کند.
سؤالات متداول درباره تیمیو و ربات همستر اسکرچ
آیا تیمیو با اسکرچ برنامهنویسی میشود؟
بله. تیمیو را میتوان با محیطهای تصویری مانند اسکرچ و VPL3 برنامهنویسی کرد. کودک میتواند بدون درگیر شدن با کدنویسی متنی، برای حسگرها رویداد تعریف کند و واکنشهایی مانند توقف، تغییر مسیر یا دنبال کردن خط را بسازد.
ربات همستر اسکرچ برای چه سنی مناسب است؟
ربات همستر اسکرچ برای کودکانی مناسب است که با مفاهیم پایه اسکرچ مانند رویداد، شرط و تکرار آشنا شدهاند. سطح پروژه باید بر اساس تجربه کودک تنظیم شود؛ پروژههای ساده میتوانند از حرکت و توقف شروع شوند و سپس به دنبال کردن خط و واکنش به حسگرها برسند.
تفاوت تیمیو و ربات همستر اسکرچ چیست؟
هر دو برای آموزش برنامهنویسی و حل مسئله به کودکان استفاده میشوند. تیمیو حسگرها و مسیرهای برنامهنویسی گستردهای دارد و برای پروژههای متنوع مناسب است. ربات همستر ابعاد کوچکتری دارد و ترکیب آن با اسکرچ، شروعی قابلفهم برای تبدیل بلوکهای برنامهنویسی به حرکت واقعی فراهم میکند.

ربات تیمیو از کجا میشه خرید؟